Sub-pixel estimation of curvature
www.kovalevsky.de, last update: October 26, 2011
 Let me know
Let me knowwhat you think
| Home | Index of Lectures | << Prev | PDF Version of this Page |
 | A grid of pixels with a projection of an
object We consider [1] the pixels as small rectangles. This supposition is adequate if the light sensitive elementary devices (the CCD or CMOS cells) of the digitizing device, (a scanner or a digital camera) have rectangular apertures and the spaces between the apertures are negligible. Then the digitizing device assigns to a pixel a grey value proportional to the portion of the area of the corresponding rectangle covered by the light area. |
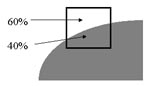 | An example: 0.6 of the pixel area is covered by the light area. Then the grey value is equal to GV=Back + 0.6*(Fore−Back). If Back== 20 and Fore== 255 then GV= 20+0.6*(255−20) = 161. |
 |
The cases may be distinguished by the number of vertices of the resulting two polygons. The green crosses x show the intersection points SP (sub-pixel point). The parameter t is the distance indicated by the arrows. The areas of the intersection SA (small area) and GA (big area) are defined in each of the cases by different functions of t and alpha. |
| Case | SA | GA |
| 0 | 0 | t+0.5 |
| 1 | t−0.5 | 1 |
| 2 | 0.5⋅L2⋅cot(α) with L=0.5+(t−0.5)⋅tan(α) |
1.0−0.5⋅K2⋅cot(α) with K=0.5−(t−0.5)⋅tan(α) |
| 3 | 0.5−(1.0−t)⋅tan(α) | 0.5+t⋅tan(α) |
| 4 | SA=0.5−(1.0−t)⋅tan(α) | 1.0−0.5⋅K2⋅cot(α) with K=0.5−(t−0.5)·tan(α) |
| 5 | 0.5⋅L2⋅cot(α) with L=0.5+(t−0.5)⋅tan(α) | 0.5+t⋅tan(α) |
 | The recognition algorithm: If GA== 1 then case 1; else if SA == 0 then case 0; else if SA > max(GA/3, 3*(GA−3/4)+1/4) then case 3; else case 2. |
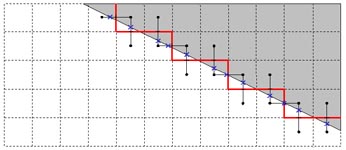 | The boundary of a binarized image (the red solid line) with the sub-pixel points SP labeled by blue crosses. The threshold of the binarization lies in the middle between the maximum and minimum gray value. Definition of the sub-pixel boundary SPB: The sub-pixel boundary of a region R in a gray value image (with no shading) is a polygon whose vertices are the sub-pixel points. An edge of the polygon connects each two sub-pixel points corresponding to subsequent boundary cracks. |
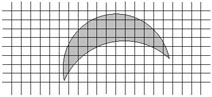
| Artificial elliptical area | Curvature of the boundary Maximum relative error = 0.71*10-2/12.2*10-2 = 6% |
 | 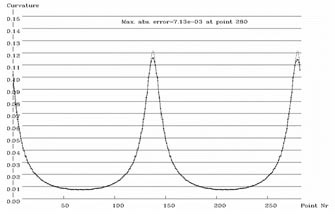 The algorithm:1. Trace the boundary of the region and store the sub-pixel points.2. Smooth the coordinates of the points by a Gaussian filter with sigma ~= 4 points. 3. Compute the curvature at each sub-pixel point with a great chord (about 1/10 of the number of cracks in a closed curve) and store the results. 4. Read the points anew, estimate the second derivative of the curvature with respect to the arc length (as an estimate of F4 in (3) of the lecture "Curvature of curves"), choose for each point the optimal chord length: optim Δx = (48*ε/F4)1/4 and recompute the curvature by means of the optimal chord. |
| The gray value image of a link of a bicycle chain (taken by a digital camera) |
The curvature of the outer boundary of the link Error about 4% |
 |
 |
The reasons of the low precision of the most methods of estimating the curvature are the following:
1. The value of the curvature depends upon the second derivative of the coordinates of the points of the curve.
2. The precision of calculating derivatives depends dramatically on the precision of measuring the coordinates.
3. In a digital image the uncertainty of the coordinates is about 1 pixel and this amount strongly influences the derivatives.
To measure the curvature of the boundary of an approximately homogeneous subset S of a 2D image we suggest to use the gray values
at the boundary of S to improve the precision of estimating the coordinates of the points of the boundary. We suggest a method of
estimating the coordinates with a precision of about 1/100 of a pixel. This gives us the possibility to estimate the curvature with a
higher precision.
[1] V. Kovalevsky, Curvature in Digital 2D Images, International Journal of Pattern Recognition and Artificial Intelligence, vol. 15, No. 7, 2001, pp. 1183 - 1200.
You can download the paper [1] at The paper| top of page: |